









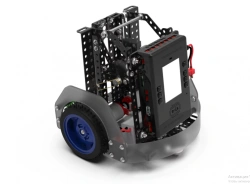
Образовательный робототехнический «СТЕМ Мастерская. Продвинутый» представляет собой комплект для разработки автономного мобильного робота на базе шасси всенаправленного движения.
Образовательный комплект может применяться в составе линейки наборов для разработки программируемых моделей автономных мобильных роботов, оснащенных техническим зрением, лазерным сканирующим дальномером и встраиваемыми аппаратно-программными комплексами для автономной навигации внутри помещений.
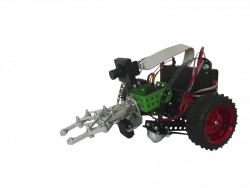
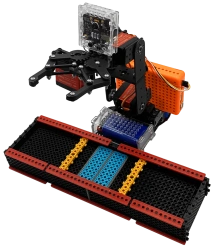
Образовательный комплект позволяет разрабатывать модель автономного мобильного робота с интегрированным манипулятором. Представленная модель представляет собой универсальное образовательное решение для углубленного изучения робототехники, сочетающее в себе два основных направления подготовки специалистов в сфере робототехники – разработка автономных мобильных роботов и разработка манипуляционных роботов и робототехнических систем со сложной кинематикой.












Напишите что вам нужно и получите предложения от проверенных поставщиков