









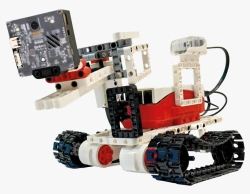
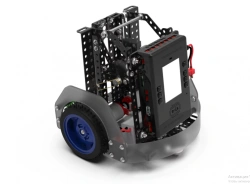
Educational robotics "STEM Workshop. Advanced" is a kit for the development of an autonomous mobile robot based on an omnidirectional motion chassis.
The educational kit can be used as part of a line of kits for the development of programmable models of autonomous mobile robots equipped with technical vision, laser scanning rangefinder and embedded hardware and software complexes for autonomous navigation indoors.
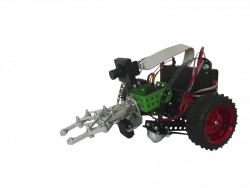
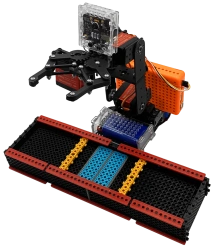
The educational kit allows the development of a model of an autonomous mobile robot with an integrated manipulator. The presented model is a universal educational solution for in-depth study of robotics, combining two main directions of training specialists in the field of robotics - the development of autonomous mobile robots and the development of manipulation robots and robotic systems with complex kinematics.












Tell us what you need and get quotes from verified suppliers