



Преобразователи линейных перемещений ПЛП барои ченкунии доимии масофаи хаттӣ аз нуқтаи ибтидоӣ то як ё чанд позиционери ҳаракаткунанда пешбинӣ шудаанд, бо табдили андозаи ҳаракати хаттӣ ба сигналҳои электрии интерфейсҳои аналогӣ ё рақамии стандартӣ. ПЛП барои ченкунии дақиқи сатҳи моеъ, позиционирии доимии узвҳои ҳаракаткунанда дар механизмҳо ва мошинҳои гуногун истифода мешаванд.
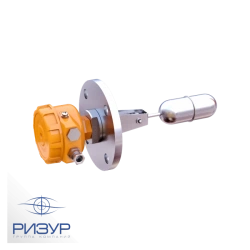
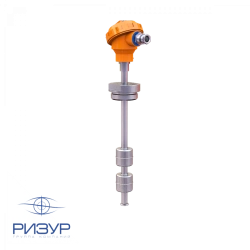
Агар ПЛП барои ченкунии сатҳи моеъ истифода шавад, поплавкҳо ҳамчун позиционерҳои ҳаракаткунанда истифода мешаванд. Таъини мавқеи дақиқи объекти ҳаракат дар ченкунии дақиқи интервали вақт байни ташаккули импулс дар катушки ҳавас ва рақамгузории импулси магнитостриксионӣ, ки ба қабулкунандаи пьезоэлектрик мерасад, бо коркарди барномавӣ сурат мегирад.
Аз ҷиҳати хосиятҳои метрологӣ ва техникӣ, ПЛП бо аналогҳои хориҷӣ баробар аст.















Tell us what you need and get quotes from verified suppliers