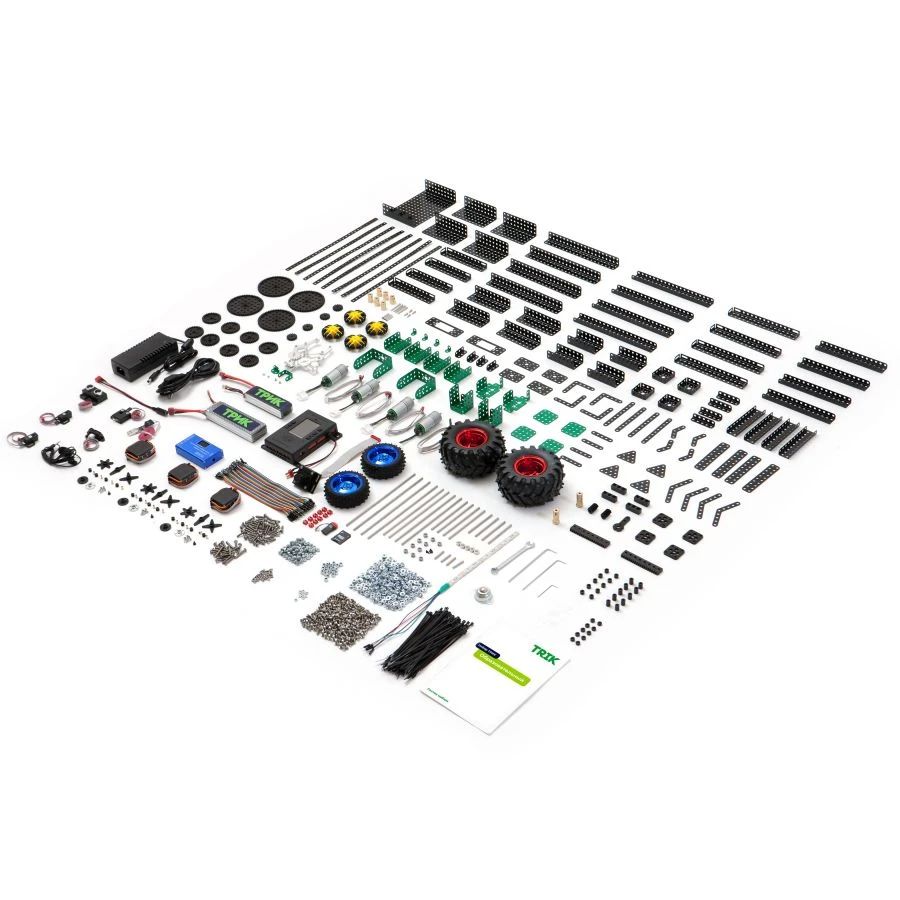

















Кибернетикии конструктор дар робото-техникӣ имкон медиҳад, ки роботҳоро бо истифодаи технологияи пешрафтаи ҷаҳонӣ ҷамъоварӣ кунед, моделҳои гуногунро аз роботҳои оддии радиоконтроллӣ то системаҳои муосири кибернетикӣ созед. Контроллери кибернетикии конструктор имкон медиҳад, ки системаҳои мустақилро ҷамъоварӣ кунед, ки метавонанд видео ва аудиопотокҳоро бидуни пайваст кардани дастгоҳҳои ҳисоббарорӣ дар контури идоракунӣ, қабул ва коркард кунанд.
Набор версияи васеъшудаи наботи ТРИК «Малый образователь-
ный» мебошад. Барои 1−2 хонанда пешбинӣ шудааст.
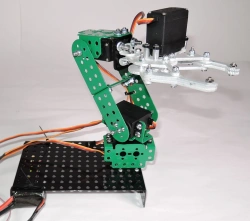
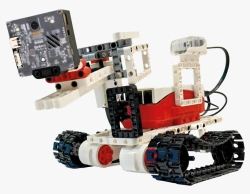
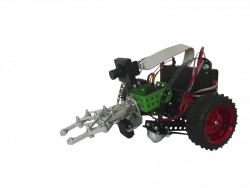
Моторҳои иловагӣ ва сервоприводҳо имкон медиҳанд, ки манипулятори зонуӣ ҷамъоварӣ шавад. LED-лента барои намоиш додани кори гироскоп ва акселерометр хизмат мекунад ва моделҳоро равшантар мекунад.
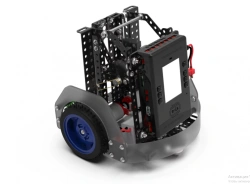
Колесоҳои калонтар имкон медиҳанд, ки внедорожик барои ҳаракат дар рӯи нобаробар ҷамъоварӣ шавад. Барои ҷамъоварии моделҳои мустақил дар маҷмӯъ батарея, ки бо зарядкунак таъмин карда мешавад, пешбинӣ шудааст.















Tell us what you need and get quotes from verified suppliers